
Image Credit: MIT CSAIL Group (https://roadmaps.csail.mit.edu/roadtracer.pdf)
The CSAIL group at the Massachusetts Institute of Technology (MIT) have improved the state-of-the art in inferring road networks from satellite imagery. This is a time-consuming, tedious, and error-prone process that has traditionally relied on human inputs. Open Street Map (OSM) is the gold-standard for cataloging road networks throughout the world, but relies almost exclusively on human input. So there are many areas that have yet to be mapped and since the data is provided by volunteers with a mixed bag of skill and attention to detail, the data is not 100% accurate. For example, the city of Toronto produces a gold standard road map and recent studies indicate this map differs from the OSM version with an error rate of approximately 14%.
Previous attempts at using deep learning to infer road networks from satellite imagery have relied on a traditional Convolutional Neural Network (CNN) trained on a large number of labeled images to produce pixel-by-pixel classification of road (vs. non-road) pixels in an image. This technique has achieved limited success with real-world imagery due primarily to varying lighting conditions and the many occlusions caused by trees, buildings, and shadows in satellite imagery that greatly complicate this process (even for human analysts).
The advancement made by the MIT engineers was to change from making pixel-by-pixel classifications to a new technique where the CNN’s goal is re-oriented to iteratively construct a graph of the road network directly from the imagery. As described in the paper: “RoadTracer: Automatic Extraction of Road Networks from Aerial Images “, the MIT process “consists of a search algorithm, guided by a decision function implemented via a CNN, to compute the graph iteratively. The search walks along roads starting from a single location known to be on the road network. Vertices and edges are added in the path that the search follows. The decision function is invoked at each step to determine the best action to take: either add an edge to the road network, or step back to the previous vertex in the search tree.”
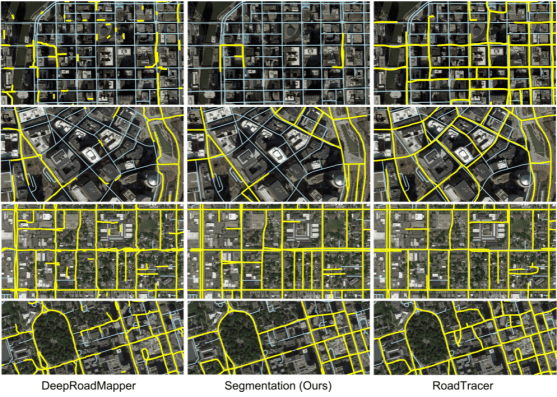
Roadtracer identifies 45% more road segments than the authors’ previous segmentation approach (see figure, above) and out-performs the previous state-of-the art system by a wide margin. It would be interesting to see if the search algorithm could be improved by a Reinforcement Learning network – another technique that is gaining widespread prominance in the deep learning community.
